Как найти решение системы неравенств. Множество решений системы линейных неравенств. Что называется решением системы неравенств
Графический метод.. 3
Симплекс-метод.. 6
Метод искусственного базиса.. 8
Принцип двойственности.. 10
Список использованной литературы... 12
Вступление
Отдельные свойства систем линейных неравенств рассматривались еще в первой половине 19 века в связи с некоторыми задачами аналитической механики. Систематическое же изучение систем линейных неравенств началось в самом конце 19 века, однако о теории линейных неравенств стало возможным говорить лишь в конце двадцатых годов 20 века, когда уже накопилось достаточное количество связанных с ними результатов.
Сейчас теория конечных систем линейных неравенств может рассматриваться как ветвь линейной алгебры, выросшая из неё при дополнительном требовании упорядоченности поля коэффициентов.
Линейные неравенства имеют особо важное значение для экономистов, т.к именно при помощи линейных неравенств можно смоделировать производственные процессы и найти наиболее выгодные планы производства, транспортировки, размещения ресурсов и т. д.
В данной работе будут изложены основные методы решения линейных неравенств, применительно к конкретным задачам.
Графический метод
Графический метод заключается в построении множества допустимых решений ЗЛП, и нахождении в данном множестве точки, соответствующей max/min целевой функции.
В связи с ограниченными возможностями наглядного графического представления данный метод применяется только для систем линейных неравенств с двумя неизвестными и систем, которые могут быть приведены к данному виду.
Для того чтобы наглядно продемонстрировать графический метод, решим следующую задачу:
- На первом этапе надо построить область допустимых решений. Для данного примера удобнее всего выбрать X2 за абсциссу, а X1 за ординату и записать неравенства в следующем виде:
 и графики и область допустимых решении находятся в первой четверти.
и графики и область допустимых решении находятся в первой четверти.
Для того чтобы найти граничные точки решаем уравнения (1)=(2), (1)=(3) и (2)=(3).

Как видно из иллюстрации многогранник ABCDEобразует область допустимых решений.
Если область допустимых решений не является замкнутой, то либо max(f)=+ ∞, либо min(f)= -∞.
- Теперь можно перейти к непосредственному нахождению максимума функции f.
Поочерёдно подставляя координаты вершин многогранника в функцию f и сравнивать значения, находим что
f(C)=f(4;1)=19 – максимум функции.
Такой подход вполне выгоден при малом количестве вершин. Но данная процедура может затянуться если вершин довольно много.
В таком случае удобнее рассмотреть линию уровня вида f=a. При монотонном увеличении числа aот -∞ до +∞ прямые f=aсмещаются по вектору нормали . Если при таком перемещении линии уровня существует некоторая точка X– первая общая точка области допустимых решений (многогранник ABCDE) и линии уровня, то f(X)- минимум fна множестве ABCDE. Если X- последняя точка пересечения линии уровня и множества ABCDE то f(X)- максимум на множестве допустимых решений. Если при а→-∞ прямая f=aпересекает множество допустимых решений, то min(f)= -∞. Если это происходит при а→+∞, то

В нашем примере прямая f=aпересевает область ABCDEв точке С(4;1). Поскольку это последняя точка пересечения, max(f)=f(C)=f(4;1)=19.
Симплекс-метод
Реальные задачи линейного программирования содержат очень большое число ограничений и неизвестных и выполняются на ЭВМ. Симплекс-метод – наиболее общий алгоритм, использующийся для решения таких задач. Суть метода заключается в том, что после некоторого числа специальных симплекс- преобразований ЗЛП, приведенная к специальному виду, разрешается. Для того, чтобы продемонстрировать симплекс-метод в действии решим, с попутными комментариями следующую задачу:

- Для того, чтобы приступить к решению ЗЛП симплекс методом, надо привести ЗЛП к специальному виду и заполнить симплекс таблицу.
Система (4) – естественные ограничения и в таблицу не вписываются. Уравнения (1), (2), (3) образуют область допустимых решений. Выражение (5) – целевая функция. Свободные члены в системе ограничений и области допустимых решений должны быть неотрицательны.
В данном примере X3, X4, X5 – базисные неизвестные. Их надо выразить через свободные неизвестные и произвести их замену в целевой функции.

Теперь можно приступить к заполнению симплекс-таблицы:
| Б. | X1 | X2 | X3 | X4 | X5 | C |
| X3 | 0 | -1 | 1 | 1 | 0 | 1 |
| X4 | 0 | 1 | -1 | 0 | 1 | 1 |
| X5 | 1 | 1 | 1 | 0 | 0 | 2 |
| f | 0 | -6 | 7 | 0 | 0 | 3 |
В первом столбце данной таблицы обозначены базисные неизвестные, в последнем – значения свободных неизвестных, в остальных – коэффициенты при неизвестных.
- Для того чтобы найти максимум функции fнадо с помощью преобразований методом Гаусса сделать так, чтобы все коэффициенты при неизвестных в последней строке были неотрицательными (для нахождения минимума, сделать так, чтобы все коэффициенты были меньше или равны нулю).
| Б | X1 | X2 | X3 | X4 | X5 | C |
| X3 | -1 | 1 | 1 | 0 | 0 | 1 |
| X4 | 1 | -1 | 0 | 1 | 0 | 1 |
| X5 | 1 | 1 | 0 | 0 | 1 | 2 |
| f | -6 | 7 | 0 | 0 | 0 | 3 |
Для этого выбираем столбец с отрицательным коэффициентом в последней строке (столбец 3) и составляем для положительных элементов данного столбца отношения свободный член/коэффициент (1/1; 2/1) . Из данных отношений выбираем наименьшее и помечаем соответствующую строку .
Нами выбран элемент в ячейке (3;3). Теперь с помощью метода Гаусса обнуляем другие коэффициенты в данном столбце, это приводит к смене базиса и мы на один шаг приближаемся к оптимальному решению.
| Б | X1 | X2 | X3 | X4 | X5 | C |
| X3 | 0 | 0 | 1 | 1 | 0 | 2 |
| X1 | 1 | -1 | 0 | 1 | 0 | 1 |
| X5 | 0 | 2 | 0 | -1 | 1 | 1 |
| f | 0 | 1 | 0 | 6 | 0 | 9 |
Как видно из таблицы теперь все коэффициенты в последней строке больше либо равны нулю. Это означает, что нами найдено оптимальное значение. Свободные неизвестные равны нулю, значению базисных неизвестных и максимуму функции f соответствует значения свободных неизвестных.
ЛИНЕЙНЫЕ УРАВНЕНИЯ И НЕРАВЕНСТВА I
§ 23 Системы линейных неравенств
Системой линейных неравенств называется любая совокупность двух или более линейных неравенств, содержащих одну и ту же неизвестную величину.
Примерами таких систем могут служить системы:
Решить систему неравенств - это значит найти все значения неизвестной величины, при которых выполняется каждое неравенство системы.
Решим приведенные выше системы.

Расположим одну под другой две числовые прямые (рис. 31); на верхней отметим те значения х , при которых выполняется первое неравенство (х > 1), а на нижней-те значения х , при которых выполняется второе неравенство (х > 4).

Сравнивая результаты на числовых прямых, замечаем, что оба неравенства одновременно будут удовлетворяться при х > 4. Ответ, х > 4.

Первое неравенство дает -3х < -б, или х > 2, а второе - х > -8, или х < 8. Далее поступаем так же, как и в первом примере. На одной числовой прямой отмечаем все те значения х , при которых выполняется первое неравенство системы, а на второй числовой прямой, расположенной под первой, все те значения х , при которых выполняется второе неравенство системы (рис. 32).

Сравнение этих двух результатов показывает, что оба неравенства одновременно будут выполняться при всех значениях х , заключенных от 2 до 8. Множество таких значений х записывается в виде двойного неравенства 2 < х < 8.
Пример 3. Решить систему неравенств

Первое неравенство системы дает 5х < 10, или х < 2, второе х > 4. Таким образом, любое число, удовлетворяющее обоим неравенствам одновременно, должно быть не больше 2 и больше 4 (рис. 33).

Но таких чисел не существует. Поэтому данная система неравенств не выполняется ни при каких значениях х . Подобные системы неравенств называются несовместными.
Упражнения
Решить данные системы неравенств (№ 179 -184):

Решить неравенства (№ 185, 186):
185. (2х + 3) (2 - 2х ) > 0. 186. (2 - π ) (2х - 15) (х + 4) > 0.
Найти допустимые значения букв, входящих в данные равенства (№ 187, 188):

Решить неравенства (№ 189, 190):
189. 1 < 2х - 5 < 2. 190. -2 < 1 - ах < 5.
191. Какой должна быть температура 10 л воды, чтобы при смешении ее с 6 л воды при температуре 15° получить воду с температурой не менее 30° и не более 40°?
192. Одна сторона треугольника равна 4 см, а сумма двух других 10 см. Найти эти стороны, если они выражаются целыми числами.
193. Известно, что система двух линейных неравенств не удовлетворяется ни при каких значениях неизвестной величины. Можно ли сказать, что отдельные неравенства этой системы невыполняются ни при каких значениях неизвестной величины?
Свяжем с каждой точкой (x 1 ,x 2 ,…x n) n-мерного пространства R n n-мерный вектор x =(x 1 ,x 2 ,…x n) с началом в начале координат и концом в точке (x 1 ,x 2 ,…x n). Множество векторов х =(х 1 ,х 2 ,...х n) в R n , компоненты которых удовлетворяют m линейным неравенствам:
A 11 х 1 +a 12 х 2 +...+a 1 n x n ≤ b 1
a 21 х 1 +a 22 х 2 +...+a 2 n x n ≤ b 2
. . . . . . . . . . . . (2)
a m 1 х 1 +a m 2 х 2 +...+a m n x n ≤ b m
называется множеством решений системы линейных неравенств.
В определении все неравенства записаны со знаком ≤. Умножая на
(-1) любое из неравенств, можно изменить его знак на противоположный. Множество решений определено для систем линейных неравенств как со знаком ³ так и ≤.
Вопросы моделирования
Предмет теории моделирования
Моделирование - это замещение одного объекта (оригинала) другим (моделью) и фиксация и изучение свойств модели. Замещение производится с целью упрощения, удешевления, ускорения изучения свойств оригинала.
В общем случае объектом-оригиналом может быть естественная или искусственная, реальная или воображаемая система. Она имеет множество параметров и характеризуется определенными свойствами. Количественной мерой свойств системы служит множество характеристик , система проявляет свои свойства под влиянием внешних воздействий .
Множество параметров и их значений отражает ее внутреннее содержание- структуру и принципы функционирования. Характеристики -это в основном ее внешний признаки, которые важны при взаимодействии с другими .
Моделирование целесообразно, когда у модели отсутствуют те признаки оригинала, которые препятствуют его исследованию.
Теория моделирования - взаимосвязанная совокупность положений, определений, методов и средств создания моделей. Сами модели являются предметом теории моделирования.
Теория моделирования является основной составляющей общей теории систем - системологии, где в качестве главного принципа постулируются осуществимые модели: система представима конечным множеством моделей, каждая из которых отражает определенную грань ее сущности.
Роль и место моделирования в исследовании систем.
Познание любой системы () сводится по существу к созданию ее модели. Перед изготовлением каждого устройства или сооружения разрабатывается его модель- проект. Любое произведение искусства является моделью, фиксирующее действительность.
Достижения математики привели к распространению математических моделей различных объектов и процессов. Помечено, что динамика функционирования разных по физической природе систем однотипными зависимостями, что позволяет моделировать их на ПК.
Классификация моделей
Физические модели. В основу классификации положена степень абстрагирования модели от оригинала. Предварительно все модели можно подразделить на 2 группы - физические и абстрактные (математические).
Ф.М. обычно называют систему, эквивалентную или подобную оригиналу, но возможно имеющую другую физическую природу. Виды Ф.М.:
Натуральные;
Квазинатуральные;
Масштабные;
Аналоговые;
Натуральные модели - это реальные исследуемые системы (макеты, опытные образцы). Имеют полную адекватность (соответствия) с системой оригинала, но дороги.
Квазинатуральные модели - совокупность натуральных и математических моделей. Этот вид используется тогда, когда модель части системы не может быть математической из-за сложности ее описания (модель человека оператора) или когда часть системы должна быть исследована во взаимодействии с другими частями, но их еще не существует или их включение очень дорого (вычислительные полигоны, АСУ).
Масштабная модель - это система той же физической природы, что и оригинал, но отличается от него масштабами. Методологической основой масштабного моделирования является теория подобия. При проектировании ВС масштабные модели могут использоваться для анализа вариантов компоновочных решений.
Аналоговыми моделями называются системы, имеющие физическую природу, отличающуюся от оригинала, но сходные с оригиналом процессы функционирования. Для создания аналоговой модели требуется наличие математического описания изучаемой системы. В качестве аналоговых моделей используются механические, гидравлические, пневматические и электрических системы. Аналоговое моделирование используют при исследовании средства ВТ на уровне логических элементов и электрических цепей, а так же на системном уровне, когда функционирование системы описывается например, дифференциальными или алгебраическими уравнениями.
Математические модели. Математические модели представляют собой формализованное представление системы с помощью абстрактного языка, с помощью математических соотношений, отражающих процесс функционирования системы. Для составления математической модели можно использовать любые математические средства - алгебраическое, дифференциальное, интегральное исчисления, теорию множеств, теорию алгоритмов и т.д. По существу вся математика создана для составления и исследования моделей объектов и процессов.
К средствам абстрактного описания систем относятся также языки химических формул, схем, чертежей, карт, диаграмм и т.п. Выбор вида модели определяется особенностями изучаемой системы и целями моделирования, т.к. исследование модели позволяет получить ответы на определенную группу вопросов. Для получения другой информации другой информации может потребоваться модель другого вида. Математические модели можно классифицировать на детерминированные и вероятностные, аналитические, численные и имитационные.
Аналитической моделью называется такое формализованное описание системы, которое позволяет решить уравнение в явном виде, используя известный математический аппарат.
Численная модель характеризуется зависимостью такого вида, который допускает только частные решения для конкретных начальных условий и количественных параметров моделей.
Имитационная модель - это совокупность описания системы и внешних воздействий, алгоритмов функционирования системы или правил изменения состояния системы под влиянием внешних и внутренних возмущений. Эти алгоритмы и правила не дают возможности использования имеющихся математических методов аналитического и численного решения, но позволяют имитировать процесс функционирования системы и производить вычисления интересующих характеристик. Имитационные модели могут быть созданы для гораздо более широкого класса объектов и процессов, чем аналитические и численные. Поскольку для реализации имитационных моделей служат ВС, средствами формализованного описания им служат универсальные и специальные алгоритмические языки. Им в наибольшей степени подходят для исследования ВС на системном уровне.
Рассмотрим ряд задач, в которых необходимо найти область решения системы линейных неравенств.
Пример 1 :
X 1 + 3х 2 ≤ 6
х 1 - х 2 ≤ 2

Искомое множество решений соответствует заштрихованной области. Вершинами множества решений служат три точки (0,2), (0,-2) и (3,1). Ониявляются точками пересечения прямых, ограничивающих множество решений.
В этом примере множество решений - многогранное выпуклое множество.
Пример 2: Изобразить множество решений следующей системы линейных неравенств в R².
X 1 + 2х 2 ≤ 4
3х 1 + 2х 2 ≤ 6

Вершинами искомого множества являются две точки с координатами: (0,2) и (1/2, 9/4). Точка с координатой (0,3) вершиной не является, так как не удовлетворяет первому неравенству. Это множество решений - неограниченно.
РешениеПример 3: Изобразить множество решений следующей системы линейных неравенств в R².
Х 1 - х 2 ³ 1
х 1 + х 2 ≤ 1

Решением первого и второго неравенств являются точки заштрихо-ванного нижнего сектора. Решением третьего неравенства являются точки заштрихованной верхней полуплоскости. Поскольку общих точек у этих двух областей нет, то нет решения и у всей системы неравенств, т.е решением является Æ.
Основная задача линейного программирования.
В общем виде задача линейного программирования (ЗЛП) ставится следующим образом.
Найти вектор х =(х 1 ,х 2 , ... x n) в R n , который максимизирует (или минимизирует) целевую функцию
F(x)=с 1 х 1 +с 2 x 2 +... +с n x n (3)
и удовлетворяет m+n линейным неравенствам:
A 11 х 1 +a 12 x 2 +...+a 1n x n ≤ b 1
a 21 x 1 +a 22 x 2 +...+a 2n x n ≤ b 2
. . . . . . . . . . . . (4)
a m1 x 1 +a m2 x 2 +...+a mn x n ≤ b m
x 1 ³0, x 2 ³0, ... x n ³0
В терминологии программирования линейная функция F(х) называется целевой функцией задачи. Множество решений системы линейных неравенств (4) называют множеством допустимых решений, а любой вектор х из этого множества называется допустимым решением. Оптимальным решением называется вектор х *, при котором целевая функция принимает своё максимальное (или минимальное) значение на допустимом множестве решений.
Графический метод решения задач линейного программирования. Покажем, как решается указанная задача графическим (геометрическим) методом. Для этого ограничимся рассмотрением системы линейных неравенств с двумя неизвестными.
Пусть задана целевая функция F=с 1 х 1 +с 2 х 2 +с 0 . Найдём среди множества точек (х 1 ,х 2) из области допустимых решений совместной системы неравенств (4) (содержащей только переменные x 1 и x 2) такие, которые придают линейной функции F наименьшее (наибольшее) значения. Для каждой i – ой точки плоскости функция F принимает фиксированное значение F=F i . Множество всех таких точек на которых функция F принимает одно и то же значение F i есть прямая с 1 х 1 +c 2 х 2 +c 0 =F i = const, перпендикулярная к некоторому вектору, называемому градиентом F (grad F). Этот вектор выходит из начала координат и имеет координаты grad F =(с 1 ,с 2). По свойству вектора grad F если указанную прямую передвигать параллельно самой себе в положительном направлении вектора grad F, то значение целевой функции F=с 1 х 1 +с 2 х 2 +с 0 на этой прямой будет возрастать, а в противоположном направлении - убывать.
Пусть при движении прямой F=const в положительном направлении вектора grad F эта прямая впервые встретится с многоугольником допустимых решений в его вершине. Тогда в этом положении F 1 прямая F=const называется опорной, и на этой прямой функция F принимает наименьшее значение. При дальнейшем движении в том же направлении (положительном) прямая F=const пройдёт через другую вершину многоугольника допустимых решений и выходя из области решений также станет опорной прямой F 2 . На ней функция F принимает наибольшее значение среди всех значений, принимаемых на многоугольнике допустимых решений. Таким образом, минимизация и максимизация целевой функции F=с 1 х 1 +с 2 х 2 +с 0 на многоугольнике допустимых решений достигается в точках пересечения этого многоугольника с опорными прямыми F=с 1 х 1 +с 2 х 2 +с 0 = const, нормальными к вектору grad F=(с 1 , с 2). Это пересечение опорной прямой с множеством допустимых решений может быть либо в одной точке (вершине многоугольника), либо в бесконечном множестве точек (если это множество сторона многоугольника).
Задание по первой, второй, третьей задаче выбирается по фамилии имени отчеству студента, а по четвертой задаче выбирается по фамилии и отчеству.
Задача №1
Таблица 1
| Первая буква | Фамилия | Имя | Отчество | ||||||||||||
| a 11 | a 12 | a 21 | a 2 2 | a 31 | a 32 | a 41 | a 4 2 | b 1 | b 2 | b 3 | C0 | C1 | C2 | ||
| А | |||||||||||||||
| Б | |||||||||||||||
| В | |||||||||||||||
| Г | |||||||||||||||
| Д | |||||||||||||||
| Е | |||||||||||||||
| Ж | |||||||||||||||
| З | |||||||||||||||
| И | |||||||||||||||
| К | |||||||||||||||
| Л | |||||||||||||||
| М | |||||||||||||||
| Н | |||||||||||||||
| О | |||||||||||||||
| П | |||||||||||||||
| Р | |||||||||||||||
| С | |||||||||||||||
| Т | |||||||||||||||
| У | |||||||||||||||
| Ф | |||||||||||||||
| Х | |||||||||||||||
| Ц | |||||||||||||||
| Ч | |||||||||||||||
| ШЭ | |||||||||||||||
| ЮЯ | |||||||||||||||
Пример 4: Минимизировать линейную форму F=14x 1 +4x 2 при ограничениях:
7х 1 + 2х 2 ³ 14
4 х 1 –7x 2 ≤ 14
Заменив знаки неравенств на знаки точных равенств, получим уравнения границ области допустимых решений. По уравнениям, полученных прямых построим искомую область:
7х 1 +2х 2 =14
4 х 1 – 7x 2 = 14
Областью допустимых решений системы неравенств является многоугольник ABCDE.
 рис 5.
рис 5.
Для нахождения точек экстремума построим прямую F=14x 1 +4x 2 =0 и вектор gradF = (14, 4). Будем передвигать прямую F=0 параллельно самой себе в направлении вектора grad F. С многоугольником ABCDE эта прямая впервые встретиться в точках Е(2,0) и А(10/9, 28/9), где целевая функция принимает одно и то же минимальное значение F(E) = F(A) =14·2+4∙0=28-min, (т.к. вектор grad F перпендикулярен прямой АЕ). Таким образом, минимальное значение целевая функция принимает в любой точке отрезка AE.
Из плана ![]() основной задачи линейного программирования следует, что число его положительных компонент не превышает .
основной задачи линейного программирования следует, что число его положительных компонент не превышает .
Опорный план называется невырожденным, если он содержит ровно положительных компонент; в противном случае план является вырожденным.
Любые переменных системы линейных уравнений с переменными (при условии ) называются основными, если определитель матрицы коэффициентов при них отличен от нуля. Тогда остальные переменных называются не основными.
Базисным решением системы m линейных уравнений с переменными называется всякое ее решение, в котором все не основные переменные имеют нулевые значения.
Теорема 1 . Множество всех допустимых решений системы ограничений задачи линейного программирования является выпуклым.
Теорема 2 . Если задача линейного программирования имеет оптимальное решение, то оно совпадает с угловой точкой множества допустимых решений.
Следствие. Если оптимальное решение не единственное, то таких решений будет множество (например, все точки отрезка, соединяющего соответствующие угловые точки).
Теорема 3 . Каждому допустимому базисному решению задачи линейного программирования соответствует угловая точка области допустимых значений, и наоборот.
Понятие о симплекс-методе .
Решение основной задачи линейного программирования геометрическим методом достигает большой наглядности в случае 2-х и 3-х переменных. Для случая же большего числа переменных геометрический метод становится невозможным. Так называемый симплекс-метод принадлежит к числу аналитических методов решения основной задачи линейного программирования. При этом ограничения, используемые при реализации симплекс-метода, обычно задаются системой линейных уравнений
A 11 х 1 +a 12 х 2 +...+a 1n x n = b 1
a 21 х 1 +a 22 х 2 +...+a 2n x n = b 2
. . . . . . . . . . . . (5)
a m 1 х 1 +a m 2 х 2 +...+a mn x n = b m
среди неотрицательных решений которой ищутся такие, которые максими-зировали бы линейную (целевую) функцию
F=с 1 х 1 +с 2 х 2 +…+с n х n +с 0
Симплексный метод основан на теоремах:
Теорема 1. Если ЗЛП имеет оптимальное решение, то целевая функция принимает экстремальное значение в одной из угловых точек выпуклого многоугольника допустимых решений.
Теорема 2. Каждому опорному решению ЗЛП соответствует угловая точка многоугольника допустимых решений и наоборот.
Исходя из этих теорем, при реализации симплекс-метода осуществляется целенаправленный перебор всех вершин так, чтобы в каждой следующей вершине значение целевой функции было бы не меньше (не больше) чем в предыдущей вершине. При этом за конечное число шагов достигается искомое оптимальное решение, или устанавливается, что ЗЛП неразрешима.
Для осуществления указанного алгоритма выберем в системе (5) max набор линейно независимых переменных (тех, для которых определитель составленный из коэффициентов перед этими переменными отличен от 0). Пусть для определенности это будут переменные х 1 , х 2 ,... х r (r ≤ m). Выразим эти переменные через остальные переменные
Х 1 = а" 1, r +1 х г+1 + ... + a" 1 n х n + b 1 "
х 2 = а" 2, r +1 х г+1 + ... + a" 2 n х n + b 2 " (6)
. . . . . . . . . . . . . . . .
х r = a" r , r +1 х г+1 + ... + a" r n x n + b r "
причем будем предполагать, что все b 1 "³0, b 2 "³0, b r "³0. Если исходные ограничительные условия заданы неравенствами, то их можно преобразовать к виду (5) путём введения новых неотрицательных переменных, так называемых балансовых (выравнивающих). Так, например,в неравенствеа 1 х 1 +а 2 х 2 +…+а n х n ≤ b достаточно добавить к левой части неравенства некоторую величину х n +1 ³ 0 равную разности между правой и левой частями неравенства и мы получим равенство a 1 x 1 + а 2 х 2 +…+а n х n + x n +1 = b. Если ограничительные условия заданы смешанным образом, то есть неравенствами и уравнениями, тогда указанным путём их так же можно свести только к уравнениям.
В полученной системе (6) переменные (неизвестные) х 1 ,х 2 ... х г называются базисными, а весь набор {х 1 , х 2 ... х г } - базисом, остальные переменные называются свободными. Система ограничений (6) называется системой, приведённой к единичному базису. Подставляя в целевую функцию F вместо базисных переменных их выражения через свободные из системы (6) получим
F = C 0 + C г+1 х г+1 + … + C n х n
Теперь, полагая все свободные переменные равными нулю, найдём значения базисных переменных:
х 1 =b 1 " , х 2 = b 2 " , ... x r =b r "
Полученное таким образом допустимое решение системы (6)
(b 1 " ,b 2 " , ... b r " , 0, ... 0) называется базисным. Для этого базисного решения значение целевой функции будет равно F Б = C 0.
Решение задачи при помощи симплекс-метода распадается на ряд шагов, заключающихся в том, что от данного базиса Б мы переходим к другому базису Б" с таким расчётом, чтобы значение F Б на новом базисе увеличивалось или, по крайней мере, не уменьшалось, то есть выполнялось F Б " ≥ F Б. При этом если все b 1 ">0, b 2 ">0,…., b r ">0 , то данное решение называется опорным и соответствует какой-нибудь угловой точке области допустимых решений определяемой исходной системой ограничений. Тогда переход от одного базисного (опорного) решения к другому соответствует переходу от одной вершины многоугольника допустимых решений к другой вершине.
ЗАДАЧА№2
Для реализации трех групп товаров коммерческое предприятие располагает тремя видами органических материально-денежных ресурсов в количестве , , единиц. При этом для продажи 1 группы товаров на 1 тыс.руб. товарооборота расход утерся в количестве единиц, ресурса второго вида в количестве единиц, ресурса третьего вида в количестве единиц. Для продажи 2 и 3 групп товара на 1 тыс.руб. товарооборота расходуется соответственно ресурса первого вида в количестве , единиц, ресурсов второго вида в количестве , единиц, ресурсов третьего вида в количестве , единиц. Прибыль от одах трех групп товаров на 1тыс.руб. товарооборота составляет соответственно , , (тыс.руб.).
Определить плановый объем и структуру товарооборота так, чтобы прибыль торгового предприятия была максимальной.
| Первая буква | Фамилия | Имя | Отчество | ||||||||||||
| А | |||||||||||||||
| Б | |||||||||||||||
| В | 1 0 | ||||||||||||||
| Г | |||||||||||||||
| Д | |||||||||||||||
| Е | |||||||||||||||
| Ж | |||||||||||||||
| З | |||||||||||||||
| И | |||||||||||||||
| К | |||||||||||||||
| Л | |||||||||||||||
| М | |||||||||||||||
| Н | |||||||||||||||
| О | |||||||||||||||
| П | |||||||||||||||
| Р | |||||||||||||||
| С | |||||||||||||||
| Т | |||||||||||||||
| У | |||||||||||||||
| Ф | |||||||||||||||
| Х | |||||||||||||||
| Ц | |||||||||||||||
| Ч | |||||||||||||||
| Ш Э | |||||||||||||||
| Ю Я |
Пример 5: Максимизировать целевую функцию F=-х 4 +х 5 при ограничениях:

Данная система уравнений совместна, так как ранги матрицы системы
 и расширенной матрицы
и расширенной матрицы 
совпадают и равны 3. Выражая базисные переменные (стоящие в единичных столбцах) х 1 , х 2 , х 3 , через свободные переменные х 4 и х 5 , приходим к системе
 (7)
(7)
Помимо системы (7) базисные переменные выразим через свободные переменные и в целевой функции (в нашем примере F = -x 4 + x 5 уже выражена через свободные переменные x 4 и x 5). Полагая теперь х 4 = 0, х 5 =0 находим базисные переменные: х 1 =1, х 2 =2, х 3 =3. Таким образом, первое допустимое базисное решение системы уравнений есть (1, 2, 3, 0, 0) . При найденном допустимом решении целевая функция F имеет значение 0, то есть F 1 =0.
Теперь попытаемся увеличить значение F 1 . Увеличение х 4 уменьшит F 1 , так как перед х 4 в выражении F = -x 4 + x 5 стоит отрицательный коэффициент, а увеличение x 5 даёт увеличение F 1 . Увеличим поэтому x 5 так, чтобы х 1 , х 2 , х 3 , не стали отрицательными, оставив х 4 =0. Из второго уравнения (7) видим, что х 5 можно увеличить до 2 (так, чтобы x 2 оставалось бы 0, при x 4 = 0). Тогда значение переменных будут (5, 0, 1, 0, 2), а значение F 2 = 2. Как видно величина F на втором шаге увеличилась.
Поскольку x 2 и x 4 оказались равными 0, то далее примем за свободные неизвестные х 2 и х 4 , тогда х 5 = 2-х 2 +2х 4
и от системы (7) переходим к эквивалентной ей системе (8)
 (8)
(8)
Причем и F в этом случае будет равной
F = 2-х 2 +х 4
Для увеличения F будем увеличивать х 4 (так как перед x 2 стоитотрицательный коэффициент) Из второго уравнения системы (8) видно, что при условии неотрицательного х 3 значение х 4 можно довести до х 4 =1/5, тогда имеем (28/5, 0, 0, 1/5, 12/5), F 3 =11/5.
Поскольку в решении получено x 2 = x 3 = 0, то примем x 2 и x 3 за свободные переменные и выразим х 1 , х 4 , х 5 , через х 2 и х 3 .Получим
X 1 = 28/5 - 7/5 x 2 - 3/5 x 3
x 4 = 1/5 + 1/5 x 2 – 1/5 x 3
x 5 = 12/5 – 3/5 x 2 – 2/5 x 3
причем F = 11/5 – 4/5 x 2 – 1/5 x 3
Так как коэффициенты при x 2 и при x 3 в выражении для F отрицательны, то увеличить значение F уже невозможно. Поэтому полагая х 2 = х 3 =0 получаем наибольшее значение F = 11/5 при решении (28/5, 0, 0, 1/5, 12/5)
Ответ: F max = 11/5 при X * = (28/5, 0, 0, 1/5, 12/5)
Симплексные таблицы.
Поскольку решать ЗЛП, используя такие рассуждения, как это делалось в предыдущем примере, явно неудобно для компактной записи решения, а так же для возможности программирования алгоритма решения на ЭВМ используются так называемые симплекс-таблицы. Для этого систему ограничений сведем к единичному базису
х 1 + а 1, r +1 х г+1 + ... + a 1 n х n = b 1
х i + а i,r+1 х г+1 + .... + a i n х n = b i (9)
х r + а r,r+1 х г+1 + ... + a r n х n = b r
а целевую функцию F - к виду:
F = C г+1 x r +1 + ... + C j х j +…+ C n x n + C 0 (10)
Равенство (10) будем называть приведённым (к свободным переменным) выражением для функции F а коэффициенты C j – оценками (индексами) соответствующих свободных переменных х j .
Коэффициенты приведенной выше системы ограничений (9), а так же различные вспомогательные переменные заносятся в симплексную таблицу (Таблица 1)
Таблица 1
| Базисные перемен-ные | Свободные члены | х 1 | ... | х i | ... | x r | х г+1 | ... | x j | ... | х n | |
| х 1 | b 1 | ... | ... | а 1,r+1 | ... | a 1j | ... | a 1n | ||||
| ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ||
| х i | b i | ... | ... | а i,r+1 | ... | a ij | ... | a in | ||||
| ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | |
| x r | b r | ... | ... | а r,r+1 | ... | a rj | ... | a rn | ||||
| F= | C 0 | ... | ... | - C г+1 | ... | - C j | ... | - C n |
Первые r столбцов с неизвестными x i - это единичные столбцы при базисных переменных x 1 ,…,x r . Следующие n-r столбцов – это столбцы при свободных переменных x r +1 ,…,x n . Полагая свободные переменные x r +1 = …=
X n = 0, находим базисные переменные x 1 = b 1 ,…, x r = b r . При этом значение целевой функции F = C 0 .
Найденный вектор-план X 1 = и значение целевой функции F = C 0 соответствуют некоторой вершине многоугольника допустимых решений. Переход к другой вершине и, следовательно, к другому вектор-плану и другому значению целевой функции осуществляется с помощью пересчета данной симплексной таблицы.
Неравенство - это два числа или математических выражения, соединённых одним из знаков: > (больше, в случае строгих неравенств), < (меньше, в случае строгих неравенств), ≥ (больше или равно, в случае нестрогих неравенств), ≤ (меньше или равно, в случае нестрогих неравенств).
Неравенство является линейным при тех же условиях, что и уравнение: оно содержит переменные только в первой степени и не содержит произведений переменных.
Решение линейных неравенств и систем линейных неравенств неразрывно связано с их геометрическим смыслом: решением линейного неравенства является некоторая полуплоскость, на которые всю плоскость делит прямая, уравнением которой задано линейное неравенство. Эту полуплоскость, а в случае системы линейных неравенств - часть плоскости, ограниченную несколькими прямыми, требуется найти на чертеже.
К решению систем линейных неравенств с большим числом переменных сводятся многие экономические задачи, в частности, задачи линейного программирования , в которых требуется найти максимум или минимум функции.
Решение систем линейных неравенств с любым числом неизвестных
Сначала разберём линейные неравенства на плоскости. Рассмотрим одно неравенство с двумя переменными и :
![]() ,
,
где - коэффициенты при переменных (некоторые числа), - свободный член (также некоторое число).
Одно неравенство с двумя неизвестными, так же как и уравнение, имеет бесчисленное множество решений. Решением данного неравенства назовём пару чисел , удовлетворяющих этому неравенству. Геометрически множество решений неравенства изображается в виде полуплоскости, ограниченной прямой
![]() ,
,
которую назовём граничной прямой.
Шаг 1. Построить прямую, ограничивающую множество решений линейного неравенства
Для этого надо знать какие-либо две точки этой прямой. Найдём точки пересечения с осями координат. Ордината точки пересечения A равна нулю (рисунок 1). Числовые значения на осях на этом рисунке относятся к примеру 1, который разберём сразу после этого теретического экскурса.

Абсциссу найдём, решая как систему уравнение прямой с уравнением оси .
Найдём пересечение с осью :

Подставляя значение в первое уравнение, получаем
Откуда .
Таким образом, нашли абсциссу точки A .
Найдём координаты точки пересечения с осью .
Абсцисса точки B равна нулю. Решим уравнение граничной прямой с уравнением оси координат:
![]() ,
,
следовательно, координаты точки B : .
Шаг 2. Начертить прямую, ограничивающую множество решений неравенства. Зная точки A и B пересечения граничной прямой с осями координат, можем начертить эту прямую. Прямая (снова рисунок 1) делит всю плоскость на две части, лежащие справа и слева (выше и ниже) от этой прямой.
Шаг 3. Установить, которая из полуплоскостей является решением данного неравенства. Для этого нужно в это неравенство подставить начало координат (0; 0). Если координаты начала удовлетворяют неравенству, то решением неравенства является полуплоскость, в которой находится начало координат. Если же координаты не удовлетворяют неравенству, то решением неравенства является полуплоскость, которая не содержит начала координат. Полуплоскость решения неравенства будем обозначать штрихами от прямой внутрь полуплоскости, как на рисунке 1.
Если решаем систему линейных неравенств , то каждый шаг выполняется для каждого из неравенств системы.
Пример 1. Решить неравенство
Решение. Начертим прямую
Подставив в уравнение прямой , получим , а подставив , получим . Следовательно, координаты точек пересечения с осями будут A (3; 0) , B (0; 2) . Через эти точки проведём прямую (опять рисунок 1).
Выберем полуплоскость решений неравенства. Для этого в неравенство подставим координаты начала (0; 0) :
получим , т. е. координаты начала удовлетворяют данному неравенству. Следовательно, решением неравенства является полуплоскость, содержащая в себе начало координат, т. е. левая (она же нижняя) полуплоскость.
Если бы данное неравенство было строгим, то есть имело бы вид
то точки граничной прямой не являлись бы решением, так как они не удовлетворяют неравенству.
Теперь рассмотрим систему линейных неравенств с двумя неизвестными:

Каждое из неравенств этой системы на плоскости определяет полуплоскость. Система линейных неравенств называется совместной, если она имеет хотя бы одно решение, и несовместной, если она не имеет решений. Решением системы линейных неравенств называется любая пара чисел (), удовлетворяющая всем неравенствам данной системы.
Геометрически решением системы линейных неравенств является множество точек, удовлетворяющих всем неравенствам системы, то есть, общая часть получаемых полуплоскостей. Поэтому геометрически в общем случае решение может быть изображено в виде некоторого многоугольника, в частном случае - может быть линия, отрезок и даже точка. Если система линейных неравенств несовместна, то на плоскости не существует ни одной точки, удовлетворяющей всем неравенствам системы.
Пример 2.
Решение. Итак, требуется найти многоугольник решений этой системы неравенств. Построим граничную прямую для первого неравенства, то есть прямую , и граничную прямую для второго неравенства, то есть прямую .
Делаем это пошагово, как было показано в теоретической справке и в примере 1, тем более, что в примере 1 строили граничную прямую для неравенства, которое является первым в данной системе.

Полуплоскости решений, соответствующие неравенствам данной системы, на рисунке 2 заштрихованы вовнутрь. Общая часть полуплоскостей решений представляет собой открытый угол ABC . Это означает, что множество точек плоскости, составляющих открытый угол ABC , является решением как первого, так и второго неравенства системы, то есть, является решением системы двух линейных неравенств. Иначе говоря, кординаты любой точки из этого множества удовлетворяют обоим неравенствам системы.
Пример 3. Решить систему линейных неравенств
Решение. Построим граничные прямые, соответствующие неравенствам системы. Делаем это, выполняя шаги, данные в теоретической справке, для каждого неравенства. Теперь определим полуплоскости решений для каждого неравенства (рисунок 3).
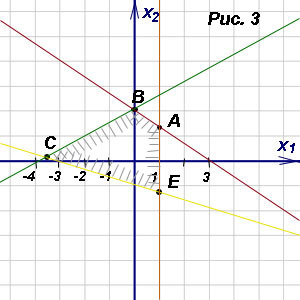
Полуплоскости решений, соответствующие неравенствам данной системы, заштрихованы вовнутрь. Пересечение полуплоскостей решений изображается, как показано на рисунке, в виде четырёхугольника ABCE . Получили, что многоугольник решений системы линейных неравенств с двумя переменными является четырёхугольником ABCE .
Всё описанное выше о системах линейных неравенств с двумя неизвестными относится и к системе неравенств с любым числом неизвестных, с той лишь разницей, что решением неравенства с n неизвестными будет совокупность n чисел (), удовлетворяющих всем неравенствам, а вместо граничной прямой будет граничная гиперплоскость n -мерного пространства. Решением будет многогранник решений (симплекс), ограниченный гиперплоскостями.
Существуют только «иксы» и только ось абсцисс, то сейчас добавляются «игреки» и поле деятельности расширяется до всей координатной плоскости. Далее по тексту словосочетание «линейное неравенство» понимаем в двумерном смысле, который прояснится через считанные секунды.
Помимо аналитической геометрии, материал актуален для ряда задач математического анализа, экономико-математического моделирования, поэтому рекомендую проштудировать данную лекцию со всей серьёзностью.
Линейные неравенства
Различают два типа линейных неравенств:
1) Строгие неравенства: .
2) Нестрогие неравенства: .
Какой геометрический смысл этих неравенств? Если линейное уравнение задаёт прямую, то линейное неравенство определяет полуплоскость .
Для понимания нижеследующей информации нужно знать разновидности прямых на плоскости и уметь строить прямые. Если возникнут трудности в этой части, прочитайте справку Графики и свойства функций – параграф про линейную функцию.
Начнём с простейших линейных неравенств. Голубая мечта любого двоечника – координатная плоскость, на которой нет ничегошеньки:

Как известно, ось абсцисс задаётся уравнением – «игрек» всегда (при любом значении «икс») равняется нулю
Рассмотрим неравенство . Как его понимать неформально? «Игрек» всегда (при любом значении «икс») положителен. Очевидно, что данное неравенство определяет верхнюю полуплоскость – ведь там и находятся все точки с положительными «игреками».
В том случае, если неравенство нестрогое , к верхней полуплоскости дополнительно добавляется сама ось .
Аналогично: неравенству удовлетворяют все точки нижней полуплоскости, нестрогому неравенству соответствует нижняя полуплоскость + ось .
С осью ординат та же самая прозаичная история:
– неравенство задаёт правую полуплоскость;
– неравенство задаёт правую полуплоскость, включая ось ординат;
– неравенство задаёт левую полуплоскость;
– неравенство задаёт левую полуплоскость, включая ось ординат.
На втором шаге рассмотрим неравенства, в которых отсутствует одна из переменных.
Отсутствует «игрек»:
Или отсутствует «икс»:
С такими неравенствами можно разобраться двумя способами, пожалуйста, рассмотрите оба подхода . Попутно вспомним-закрепим школьные действия с неравенствами, уже разобранные на уроке Область определения функции .
Пример 1
Решить линейные неравенства:
Что значит решить линейное неравенство?
Решить линейное неравенство – это значит найти полуплоскость , точки которой удовлетворяют данному неравенству (плюс саму прямую, если неравенство нестрогое). Решение , как правило, графическое .
Удобнее сразу выполнить чертёж, а потом всё закомментировать:
а) Решим неравенство
Способ первый
Способ весьма напоминает историю с координатными осями, которую мы рассмотрели выше. Идея состоит в преобразовании неравенства – чтобы в левой части оставить одну переменную без всяких констант, в данном случае – переменную «икс».
Правило : В неравенстве слагаемые переносятся из части в часть со сменой знака, при этом знак САМОГО неравенства не меняется (например, если был знак «меньше», то так и останется «меньше»).
Переносим «пятёрку» в правую часть со сменой знака:
Правило ПОЛОЖИТЕЛЬНОЕ не меняется .
Теперь чертим прямую (синяя пунктирная линия). Прямая проведена пунктиром по той причине, что неравенство строгое , и точки, принадлежащие данной прямой, заведомо не будут входить в решение.
Каков смысл неравенства ? «Икс» всегда (при любом значении «игрек») меньше, чем . Очевидно, что этому утверждению удовлетворяют все точки левой полуплоскости. Данную полуплоскость, в принципе, можно заштриховать, но я ограничусь маленькими синими стрелочками, чтобы не превращать чертёж в художественную палитру.
Способ второй
Это универсальный способ. ЧИТАЕМ ОЧЕНЬ ВНИМАТЕЛЬНО!
Сначала чертим прямую . Для ясности, кстати, уравнение целесообразно представить в виде .
Теперь выбираем любую точку плоскости, не принадлежащую прямой
. В большинстве случаев, самая лакомая точка, конечно . Подставим координаты данной точки в неравенство :![]()
Получено неверное неравенство (простыми словами, так быть не может), значит, точка не удовлетворяет неравенству .
Ключевое правило нашей задачи
:
не удовлетворяет
неравенству, то и ВСЕ
точки данной полуплоскости не удовлетворяют
данному неравенству.
– Если какая-либо точка полуплоскости (не принадлежащая прямой) удовлетворяет
неравенству, то и ВСЕ
точки данной полуплоскости удовлетворяют
данному неравенству.
Можете протестировать: любая точка справа от прямой не будет удовлетворять неравенству .
Какой вывод из проведённого опыта с точкой ? Деваться некуда, неравенству удовлетворяют все точки другой – левой полуплоскости (тоже можете проверить).
б) Решим неравенство
Способ первый
Преобразуем неравенство:
Правило : Обе части неравенства можно умножить (разделить) на ОТРИЦАТЕЛЬНОЕ число, при этом знак неравенства МЕНЯЕТСЯ на противоположный (например, если был знак «больше либо равно», то станет «меньше либо равно»).
Умножаем обе части неравенства на :
Начертим прямую (красный цвет), причём, начертим сплошной линией, так как неравенство у нас нестрогое , и прямая заведомо принадлежит решению.
Проанализировав полученное неравенство , приходим к выводу, что его решением является нижняя полуплоскость (+ сама прямая).
Подходящую полуплоскость штрихуем либо помечаем стрелочками.
Способ второй
Начертим прямую . Выберем произвольную точку плоскости (не принадлежащую прямой), например, и подставим её координаты в наше неравенство :![]()
Получено верное неравенство , значит, точка удовлетворяет неравенству , и вообще – ВСЕ точки нижней полуплоскости удовлетворяют данному неравенству.
Здесь подопытной точкой мы «попали» в нужную полуплоскость.
Решение задачи обозначено красной прямой и красными стрелочками.
Лично мне больше нравится первый способ решения, поскольку второй таки более формален.
Пример 2
Решить линейные неравенства:
Это пример для самостоятельного решения. Постарайтесь решить задачу двумя способами (к слову, это хороший способ проверки решения). В ответе в конце урока будет только итоговый чертёж.
Думаю, после всех проделанных в примерах действий вам придётся на них жениться не составит труда решить простейшее неравенство вроде и т.п.
Переходим к рассмотрению третьего, общего случая, когда в неравенстве присутствуют обе переменные:
Как вариант, свободный член «цэ» может быть нулевым.
Пример 3
Найти полуплоскости, соответствующие следующим неравенствам:
Решение : Здесь используется универсальный метод решения с подстановкой точки.
а) Построим уравнение прямой , при этом линию следует провести пунктиром, так как неравенство строгое и сама прямая не войдёт в решение.
Выбираем подопытную точку плоскости, которая не принадлежит данной прямой, например, , и подставим её координаты в наше неравенство:
Получено неверное неравенство
, значит, точка и ВСЕ точки данной полуплоскости не удовлетворяют неравенству . Решением неравенства будет другая полуплоскость, любуемся синими молниями:
б) Решим неравенство . Сначала построим прямую. Это сделать несложно, перед нами каноничная прямая пропорциональность . Линию проводим сплошняком, так как неравенство нестрогое.
Выберем произвольную точку плоскости, не принадлежащую прямой . Хотелось бы снова использовать начало координат, но, увы, сейчас оно не годится. Поэтому придётся работать с другой подругой. Выгоднее взять точку с небольшими значениями координат, например, . Подставим её координаты в наше неравенство:
Получено верное неравенство , значит, точка и все точки данной полуплоскости удовлетворяют неравенству . Искомая полуплоскость помечена красными стрелочками. Кроме того, в решение входит сама прямая .
Пример 4
Найти полуплоскости, соответствующие неравенствам:
Это пример для самостоятельного решения. Полное решение, примерный образец чистового оформления и ответ в конце урока.
Разберём обратную задачу:
Пример 5
а) Дана прямая . Определить полуплоскость, в которой находится точка , при этом сама прямая должна входить в решение.
б) Дана прямая . Определить полуплоскость, в которой находится точка . Сама прямая не входит в решение.
Решение : здесь нет необходимости в чертеже, и решение будет аналитическим. Ничего трудного:
а) Составим вспомогательный многочлен и вычислим его значение в точке :
. Таким образом, искомое неравенство будет со знаком «меньше». По условию прямая входит в решение, поэтому неравенство будет нестрогим:
б) Составим многочлен и вычислим его значение в точке :
. Таким образом, искомое неравенство будет со знаком «больше». По условию прямая не входит в решение, следовательно, неравенство будет строгим: .
Ответ :
Творческий пример для самостоятельного изучения:
Пример 6
Даны точки и прямая . Среди перечисленных точек найти те, которые вместе с началом координат лежат по одну сторону от заданной прямой.
Небольшая подсказка: сначала нужно составить неравенство, определяющее полуплоскость, в которой находится начало координат. Аналитическое решение и ответ в конце урока.
Системы линейных неравенств
Система линейных неравенств – это, как вы понимаете, система, составленная из нескольких неравенств. Лол, ну и определение выдал =) Ёжик – это ёжик, ножик – это ножик. А ведь правда – получилось просто и доступно! Нет, если серьёзно, не хочется приводить каких-то примеров в общем виде, поэтому сразу перейдём к насущным вопросам:
Что значит решить систему линейных неравенств?
Решить систему линейных неравенств – это значит найти множество точек плоскости , которые удовлетворяют каждому неравенству системы.
В качестве простейших примеров рассмотрим системы неравенств, определяющих координатные четверти прямоугольной системы координат («рисунок двоечников» находится в самом начале урока):
Система неравенств задаёт первую координатную четверть (правая верхняя). Координаты любой точки первой четверти, например, ![]() и т.д. удовлетворяют каждому
неравенству данной системы.
и т.д. удовлетворяют каждому
неравенству данной системы.
Аналогично:
– система неравенств задаёт вторую координатную четверть (левая верхняя);
– система неравенств задаёт третью координатную четверть (левая нижняя);
– система неравенств задаёт четвёртую координатную четверть (правая нижняя).
Система линейных неравенств может не иметь решений , то есть, быть несовместной . Снова простейший пример: . Совершенно очевидно, что «икс» не может одновременно быть больше трёх и меньше двух.
Решением системы неравенств может являться прямая, например: . Лебедь, рак, без щуки, тянут воз в две разные стороны. Да воз и ныне там – решением данной системы является прямая .
Но самый распространённый случай, когда решением системы является некоторая область плоскости . Область решений может быть не ограниченной (например, координатные четверти) либо ограниченной . Ограниченная область решений называется многоугольником решений системы .
Пример 7
Решить систему линейных неравенств
На практике в большинстве случаев приходится иметь дело с нестрогими неравенствами, поэтому оставшуюся часть урока водить хороводы будут именно они.
Решение : то, что неравенств многовато, пугать не должно. Сколько может быть неравенств в системе? Да сколько угодно. Главное, придерживаться рационального алгоритма построения области решений:
1) Сначала разбираемся с простейшими неравенствами. Неравенства определяют первую координатную четверть, включая границу из координатных осей. Уже значительно легче, так как область поиска значительно сузилась. На чертеже сразу отмечаем стрелочками соответствующие полуплоскости (красные и синие стрелки)
2) Второе по простоте неравенство – здесь отсутствует «игрек». Во-первых, строим саму прямую , а, во-вторых, после преобразования неравенства к виду , сразу становится понятно, что все «иксы» меньше, чем 6. Отмечаем зелёными стрелками соответствующую полуплоскость. Ну что же, область поиска стала ещё меньше – такой не ограниченный сверху прямоугольник.
3) На последнем шаге решаем неравенства «с полной амуницией»: . Алгоритм решения мы подробно рассмотрели в предыдущем параграфе. Вкратце: сначала строим прямую, потом с помощью подопытной точки находим нужную нам полуплоскость.
Встаньте, дети, встаньте в круг:
Область решений системы представляет собой многоугольник , на чертеже он обведён малиновой линией и заштрихован. Перестарался немного =) В тетради область решений достаточно либо заштриховать, либо жирнее обвести простым карандашом.
Любая точка данного многоугольника удовлетворяет КАЖДОМУ неравенству системы (для интереса можете проверить).
Ответ : решением системы является многоугольник .
При оформлении на чистовик неплохо бы подробно расписать, по каким точкам вы строили прямые (см. урок Графики и свойства функций ), и как определяли полуплоскости (см. первый параграф данного урока). Однако на практике в большинстве случаев вам зачтут и просто правильный чертёж. Сами же расчёты можно проводить на черновике или даже устно.
Помимо многоугольника решений системы, на практике, пусть и реже, встречается открытая область. Попытайтесь разобрать следующий пример самостоятельно. Хотя, точности ради, пыток тут никаких – алгоритм построения такой же, просто область получится не ограниченной.
Пример 8
Решить систему
Решение и ответ в конце урока. У вас, скорее всего, будут другие буквенные обозначения вершин полученной области. Это не принципиально, главное, правильно найти вершины и правильно построить область.
Не редкость, когда в задачах требуется не только построить область решений системы, но и найти координаты вершин области. В двух предыдущих примерах координаты данных точек были очевидны, но на практике всё бывает далеко не айс:
Пример 9
Решить систему и найти координаты вершин полученной области
Решение
: изобразим на чертеже область решений данной системы. Неравенство задаёт левую полуплоскость с осью ординат, и халявы тут больше нет. После расчётов на чистовике/черновике или глубоких мыслительных процессов, получаем следующую область решений: